นักวิจัยไทย คิดค้น PMK “หุ่นยนต์เสริมพลังแขน” PMK “Robotic Exoskeleton Hand”
พ.อ.ผศ.นพ.อารมย์ ขุนภาษี เผยว่า เนื่องจากโรงพยาบาลมีผู้ป่วยราชการสนามและผู้ป่วยพลเรือนจำนวนมาก ส่วนหนึ่งมีปัญหาได้รับบาดเจ็บบริเวณหัวไหล่ ข้อศอก และข้อมือ โดยทางทีมวิจัยได้ร่วมกันพัฒนาขึ้นมาเพื่อใช้สำหรับผู้ป่วยที่มีปัญหาแขนและข้อมือที่อ่อนแรง โดยจะเหมาะสมสำหรับผู้ป่วยที่มีกำลังแขนลดลงอันเนื่องมาจากความผิดปกติของระบบประสาท เช่นการบาดเจ็บของไขสันหลังส่วนคอ (Traumatic cervical myelopathy) การบาดเจ็บของรากประสาท (Traumatic cervical radiculopathy) หรือร่างแหประสาทที่รักแร้ได้รับบาดเจ็บ (Brachial plexus injury) เป็นต้น นอกจากนี้อาจพัฒนานำไปใช้ประโยชน์ให้กับผู้ป่วยที่มีปัญหาอ่อนแรงของแขน และมือจากภาวะปลายเส้นประสาทเสื่อม (Peripheral neuropathy) รวมถึงในกรณีที่มีการอ่อนแรงจากโรคกล้ามเนื้ออ่อนแรงเช่น Muscular dystrophy ได้อีกด้วย โดยในการออกแบบเพื่อให้หุ่นยนต์เสริมพลังแขนทำงานนั้น ต้องคำนึงถึงการเคลื่อนไหวของข้อไหล่ ข้อศอก ข้อมือและข้อนิ้ว ซึ่งการทำงานจะซับซ้อนและให้ประสานสัมพันธ์กันนั้นเป็นโจทย์ที่ยากมาก
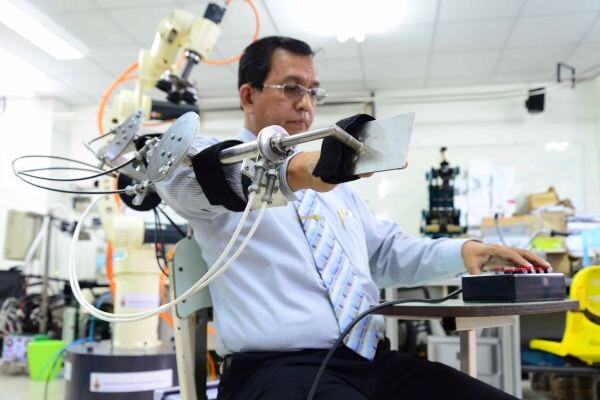
ทางด้าน ผศ.ดร.เดชฤทธิ์ มณีธรรม อธิบายเพิ่มเติมว่า "หุ่นยนต์เสริมพลังแขนนี้ ประกอบไปด้วยส่วนสำคัญดังนี้ ส่วนแรกเป็นโครงสร้าง(Hardware) จะประกอบไปด้วยโครงสร้างอลูมิเนียมที่ยึดติดกับเก้าอี้ด้านหลัง และโครงสร้างนี้เองจะยึดติดกับดีซีมอเตอร์ (DC Motor) ขนาด 150 วัตต์ 24 โวลต์ จำนวน 6 ตัว โดยแต่ละตัวจะมีเกียร์ทด ขนาดอัตราทด 1:50 เพื่อใช้ส่งกำลังผ่านลวดสลิง ไปแต่ละแกนของการเคลื่อนที่ แกนมอเตอร์ ด้านหลังยึดติดกับเอ็นโครเดอร์ (Encoder) ขนาด 1000 รอบ ส่วนที่สองเป็นส่วนควบคุม (Control) โดยใช้พีแอลซี (PLC) เป็นตัวควบคุมแบบ PID Control ทั้งการควบคุมแบบตำแหน่ง (Position Control) และควบคุมความเร็ว (Speed Control) ส่วนที่สาม คือ ซอฟต์แวร์ (Software) จะใช้ภาษาแลดเดอร์ไดอะแกรม และฟังชั่นบล็อกในการเขียนควบคุมการทำงานทั้งระบบ มีหลักการทำงานคือ ผู้ป่วยสามารถควบคุมการเคลื่อนไหวของหัวไหล่จะควบคุมการกางหรือบิดเข้าด้านใน การบิดออกด้านนอก การยกไหล่ขึ้น - ลง การหมุนควง การหมุนและเอียงไหล่ขึ้น จะสัมพันธ์กับการเคลื่อนที่ของข้อศอกและข้อมือ การควบคุมทั้งระบบจะเป็นแบบวงจรรอบปิด โดยใช้ทฤษฎี พี ไอ ดี ( PID Control System) มาควบคุมการทำงานทำให้สามารถตรวจจับความเร็ว (Speed Control) และตำแหน่ง (Position Control) ของการเคลื่อนที่ได้
ซึ่งขณะนี้ทางทีมวิจัยกำลังพัฒนาให้ผู้ป่วยสามารถสวมใส่หุ่นยนต์เสริมพลังแขนเพื่อให้ทำภารกิจต่าง ๆ นอกสถานที่ได้โดยไม่ได้ยึดติดกับอุปกรณ์ส่วนใด สอบถามรายละเอียดเพิ่มเติมได้ที่ กองประชาสัมพันธ์ มทร.ธัญบุรี 02-549-4994




ติดต่อเราได้ที่ facebook.com/newswit